꽃 사이를 자유롭게 날아다니는 꿀벌과 물속에서 서식하는 열대어 제브라피시(zebra fish)가 살면서 만날 확률은 지극히 낮다. 생존 환경도 다르고 서로 교감하는 방법도 다르다. 혹시나 둘 사이를 이어주는 통역가가 있다면 모를까.
(source:EPFL)
믿기지 않겠지만 이런 가정에서 시작한 연구가 최근 소개됐다. 꿀벌과 제브라피시는 실험에서 만났고 서로 소통하는 데 성공했다. 통역은 사람이 아닌 로봇이 맡았다.
로봇을 이용해 서로 다른 동물이 소통하고 서로에게 영향을 미치게 하는 연구가 로봇 공학 전문 학술지 ‘사이언스 로보틱스(Science Robotics)’ 3월 20일 자에 실렸다. 유럽위원회(EC)의 IT 분야 아이디어와 연구 주제를 탐색하고 육성하는 장기 IT 연구・개발(R&D) 프로그램 ‘미래 및 신흥기술(Future and Emerging technologies, FET)’에서 프로젝트를 통해 진행한 연구다.

(source:assisi-project.eu)
프로젝트 이름은 ‘ASSISIbf(Animal and robot Societies Self-organise and Integrate by Social Interaction (bees and fish))’이다. ASSISIbf 프로젝트는 동물 간 소통을 가능하게 하는 ICT 시스템 개발을 목표로 시작됐다. 프로젝트에는 스위스 로잔공과대학(EPFL) 연구진을 비롯해 기타 유럽 대학에 속한 엔지니어들이 참여했다.
연구진은 바퀴벌레, 병아리, 물고기 등 다양한 동물을 대상으로 실험을 진행했다. 실제 실험에 성공한 대상은 꿀벌과 제브라피시였다. 연구원은 전혀 다른 동물이 상호작용하는 가능성을 실험을 통해 밝혀냈다. 꿀벌과 제브라피시는 700km나 떨어져 있었다. 꿀벌은 오스트리아 그라츠대학교 실험실에, 제브라피시는 스위스에 위치했다.
(source:EPFL)
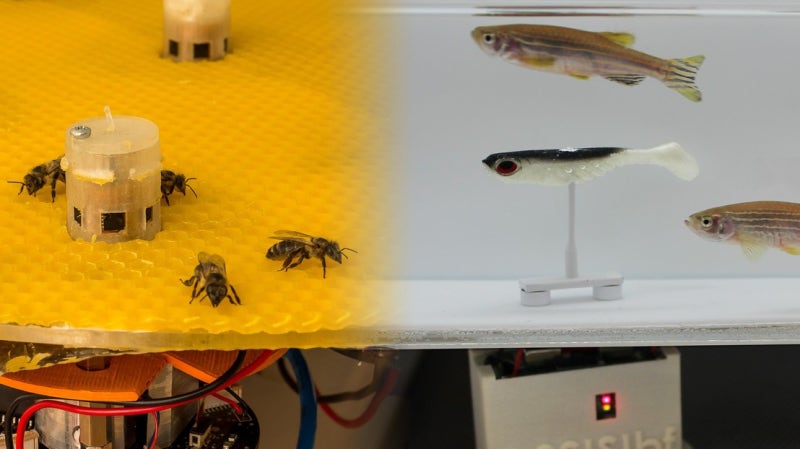
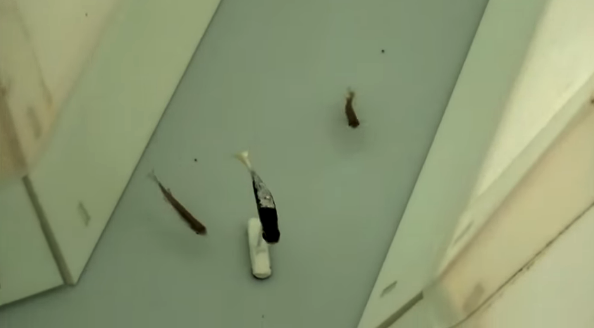
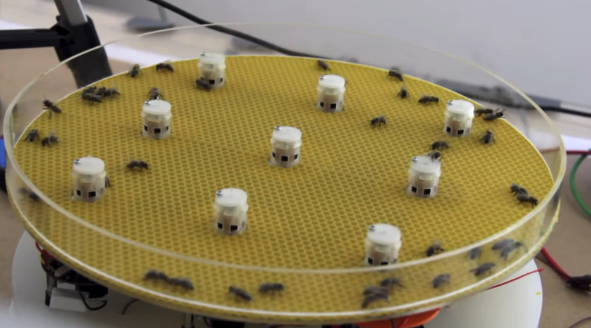
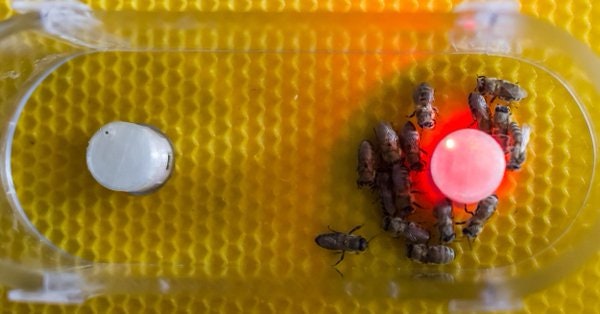
실험에서는 꿀벌과 제브라피시가 사는 곳에 로봇을 배치했다. 로봇은 꿀벌 그룹과 제브라피시 그룹의 행동을 관찰하고 기록했다. 저장한 데이터는 각 그룹에 배치된 로봇끼리 서로 교환했다. 수신한 정보를 가지고 로봇은 해당 그룹이 이해하는 신호로 변환하는 작업을 수행한다. 꿀벌 그룹에 배치한 로봇은 진동과 온도 변화, 공기 이동 등의 신호를 내보냈다. 제브라피시 그룹에 배치한 로봇은 모양과 색깔, 줄무늬와 같은 시각 신호와 몸을 진동하고 꼬리를 움직이는 행동 신호를 동시에 보냈다.
(source:EPFL)
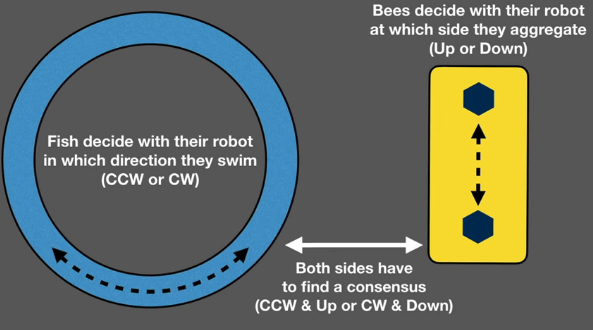
두 동물은 로봇이 보내는 신호에 반응했다. 실험 초기만해도 꿀벌은 산만하게 이리저리 돌아다녔으며 제브라피시도 한쪽 방향으로만 헤엄치지 않았다. 하지만 수정을 거듭하면서 동물 행동이 어떤 합의에 도달한 모습을 확인할 수 있었다. 로봇의 신호를 받은 제브라피시는 특정 방향으로 헤엄치기 시작했고 꿀벌은 한 곳에 집결하는 행동을 보였다. 로봇이 보내는 신호를 통해 꿀벌과 제브라피시는 서로의 결정에 영향을 미치게 됐다.
(source:EPFL)
지금까지 로봇은 한 종류의 동물과 제대로 소통하는 것이 가능한 수준에 불과했다. 하지만 이번 연구를 통해 서로 다른 동물도 각자에게 영향을 줄 수 있다는 가능성을 확인했다.
프란체스코 몬다다(Francesco Mondada) EPFL 바이오로보틱스연구소(BioRob) 교수는 “로봇은 마치 국제회의에 참석한 협상가나 통역가처럼 행동했다”며 “다양한 정보 교류로 두 동물은 공유된 결정을 내렸다”고 말했다.
프랭크 보넷(Frank Bonnet) EPFL BioRob 연구원은 “우리는 동물 사이에 연결 다리를 놓아 서로 대화하게 했다“며 “동물은 다른 동물이 가진 특징에 적응하는 모습도 보였다”고 말했다. 실험에 따르면 평소보다 벌은 더 많이 움직였고 물고기는 더 자주 무리지어 움직였다.
또는 여기를 클릭하세요~
이번 연구는 로봇공학자에게 기계가 생물학적 신호를 포착하고 이를 변환하는 방법을 알게 한다. 또한, 생물학자에게는 동물의 행동을 이해하고 생태계 안에서 사람이 그들과 어떻게 상호작용해야 하는지에 대한 힌트를 준다. 연구가 더욱 진척된다면 짐승으로 인한 농가 피해나 새가 공항 안으로 날아드는 위험한 상황을 막을 수도 있다. 동물의 감각 능력을 이해한다면 동물 서식지를 관찰하는 방법도 달라질 것이다.
(원문: 여기를 클릭하세요~)